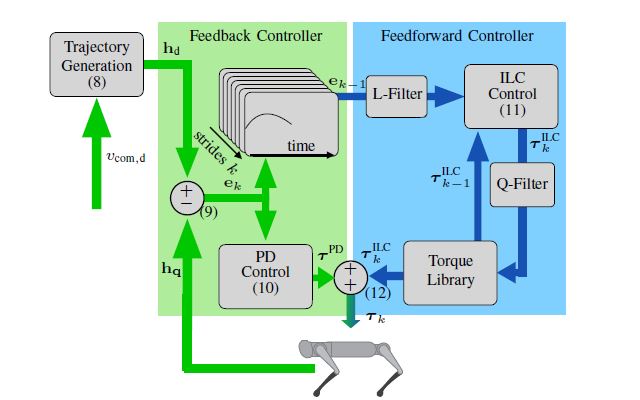
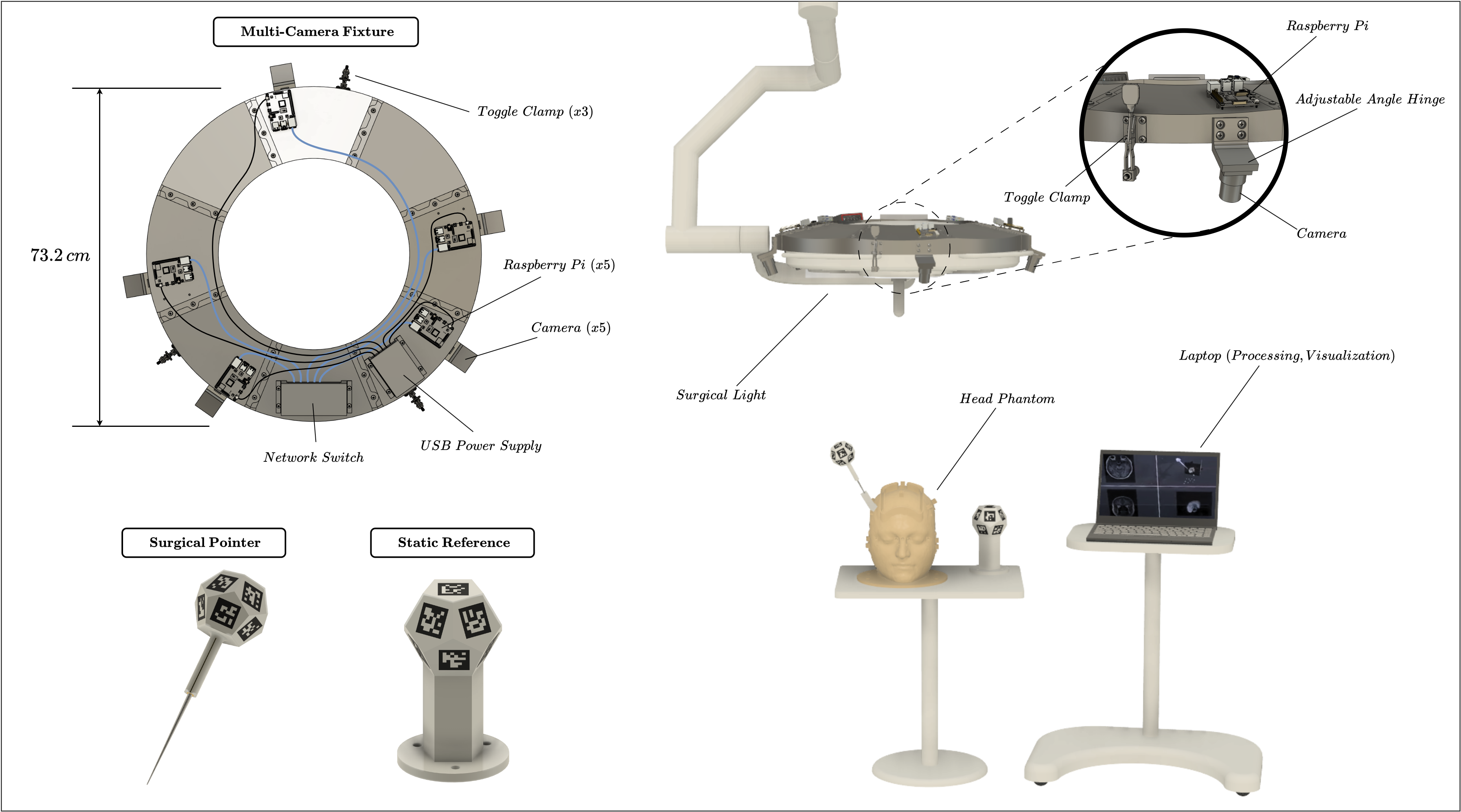
research Controller Design Low-Level Controller for the Unitree Go1 Robot Multi-Camera Setup for Image Guided Neurosurgery Development of a low-cost multi-camera optical tracking system for neuronavigated surgery. schoolwork Applied Robotics A series of projects implementing kinematic and dynamic controllers for various robots in my graduate course. fun